1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
| #include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
#include <WiFi.h>
#include <ESPAsyncWebServer.h>
AsyncWebServer server(80);
const char index_html[] PROGMEM = R"rawliteral(
<!DOCTYPE HTML>
<html>
<head>
<meta charset="utf-8">
</head>
<body>
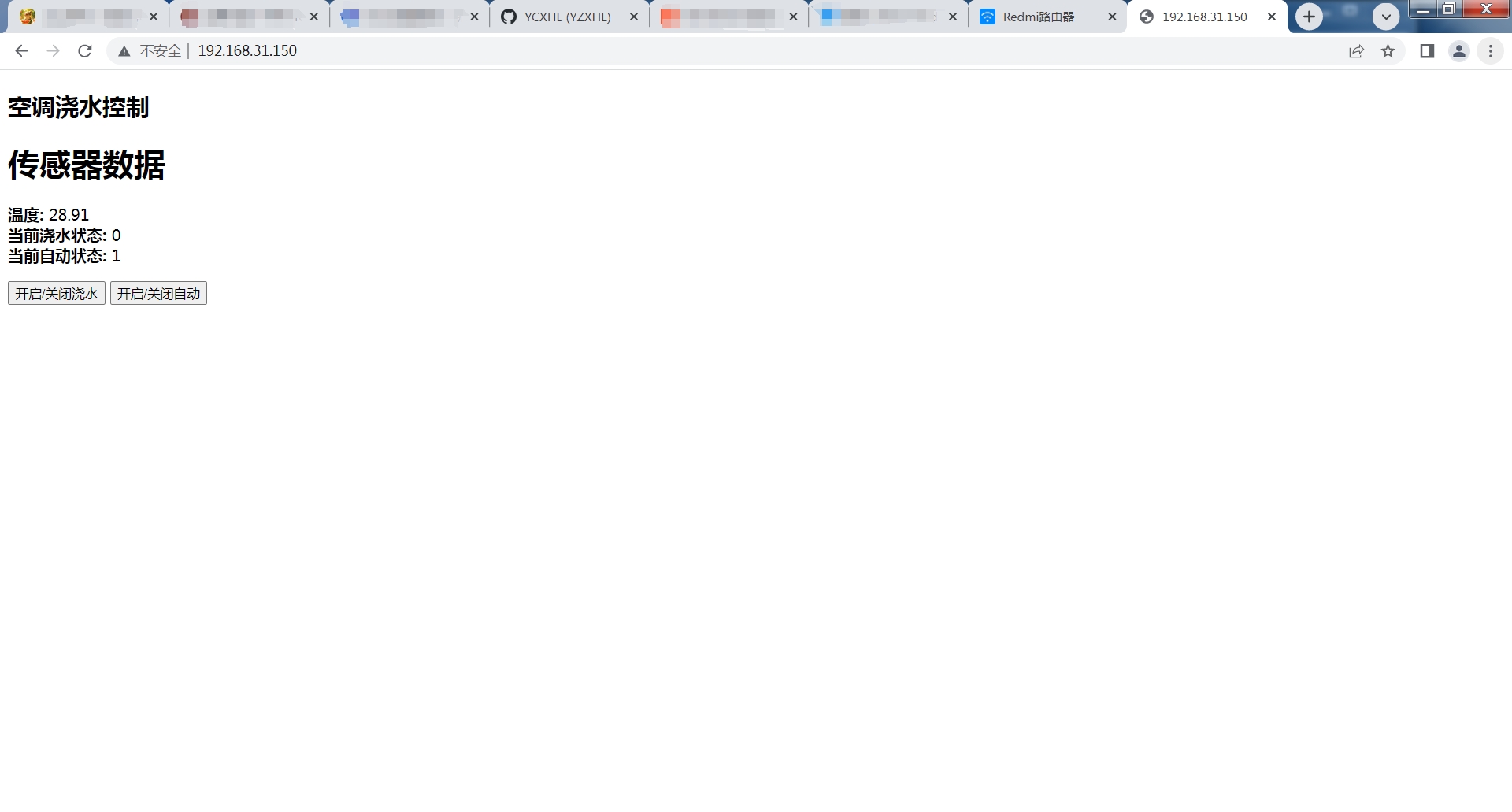
<h2>空调浇水控制</h2>
<!-- 创建一个ID位dht的盒子用于显示获取到的数据 -->
<div id="dht">
</div>
<button onclick="set()"> 开启/关闭浇水 </button>
<button onclick="autoset()"> 开启/关闭自动 </button>
</body>
<script>
// 按下按钮会运行这个JS函数
function set() {
var payload = "ESP32"; // 需要发送的内容
// 通过get请求给 /set
var xhr = new XMLHttpRequest();
xhr.open("GET", "/set?value=" + payload, true);
xhr.send();
}
function autoset() {
var payload = "ESP32"; // 需要发送的内容
// 通过get请求给 /set
var xhr = new XMLHttpRequest();
xhr.open("GET", "/auto?value=" + payload, true);
xhr.send();
}
// 设置一个定时任务, 1000ms执行一次
setInterval(function () {
var xhttp = new XMLHttpRequest();
xhttp.onreadystatechange = function () {
if (this.readyState == 4 && this.status == 200) {
// 此代码会搜索ID为dht的组件,然后使用返回内容替换组件内容
document.getElementById("dht").innerHTML = this.responseText;
}
};
// 使用GET的方式请求 /dht
xhttp.open("GET", "/dht", true);
xhttp.send();
}, 200)
</script>)rawliteral";
Adafruit_MPU6050 mpu;
#define mpu6050TimeInterval 100
unsigned long mpu6050Times = 0;
float mpu6050Temp = 0;
float xAcceleration , yAcceleration , zAcceleration ;
float xAccele , yAccele , zAccele ;
float xGyro = 0, yGyro = 0, zGyro = 0;
float gravity = 9.8;
int isdone=0;
bool iswater=0,isauto=1;
String Merge_Data(void)
{
int Humidity = 50;
int Temperature = 26;
String dataBuffer = "<p>";
dataBuffer += "<h1>传感器数据 </h1>";
dataBuffer += "<b>温度: </b>";
dataBuffer += String(mpu6050Temp);
dataBuffer += "<br />";
dataBuffer += "<b>当前浇水状态: </b>";
dataBuffer += String(iswater);
dataBuffer += "<br />";
dataBuffer += "<b>当前自动状态: </b>";
dataBuffer += String(isauto);
dataBuffer += "<br /></p>";
return dataBuffer;
}
void Config_Callback(AsyncWebServerRequest *request)
{
iswater=!iswater;
isauto=0;
request->send(200, "text/plain", "OK");
}
void Auto_Callback(AsyncWebServerRequest *request)
{
isauto=!isauto;
request->send(200, "text/plain", "OK");
}
void setup()
{
WiFi.begin("Gundan","lqy170309");
while(WiFi.status()!=WL_CONNECTED){
delay(500);
Serial.println("正在连接...");
}
Serial.println("连接成功!");
pinMode(1,OUTPUT);
server.on("/", HTTP_GET, [](AsyncWebServerRequest *request)
{ request->send_P(200, "text/html", index_html); });
server.on("/dht", HTTP_GET, [](AsyncWebServerRequest *request)
{ request->send_P(200, "text/plain", Merge_Data().c_str()); });
server.on("/set", HTTP_GET, Config_Callback);
server.on("/auto", HTTP_GET, Auto_Callback);
server.begin();
Serial.begin(115200);
if (!mpu.begin()) {
while (millis() - 1000) {
Serial.println("Failed to find MPU6050 chip");
}
}
mpu.setAccelerometerRange(MPU6050_RANGE_16_G);
mpu.setGyroRange(MPU6050_RANGE_250_DEG);
mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
Serial.println("Go online!");
}
void loop() {
getMpu6050Data();
if(isauto==1){
if(mpu6050Temp>=30){
digitalWrite(1,HIGH);
iswater=1;
}else if(mpu6050Temp<30){
digitalWrite(1,LOW);
iswater=0;
}
}else if(isauto==0){
digitalWrite(1,iswater);
}
}
void getMpu6050Data() {
if (millis() - mpu6050Times >= mpu6050TimeInterval) {
mpu6050Times = millis();
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
mpu6050Temp = temp.temperature;
xAcceleration = a.acceleration.x ;
yAcceleration = a.acceleration.y ;
zAcceleration = a.acceleration.z ;
xAccele = xAcceleration / gravity;
yAccele = yAcceleration / gravity;
zAccele = zAcceleration / gravity;
xGyro = g.gyro.x;
yGyro = g.gyro.y;
zGyro = g.gyro.z;
Serial.print("Temp: ");
Serial.print(mpu6050Temp);
Serial.print(" , x-accele: ");
Serial.print(xAccele);
Serial.print(" , y-accele: ");
Serial.print(yAccele);
Serial.print(" , z-accele: ");
Serial.print(zAccele);
Serial.print(" , x-gyro:");
Serial.print(xGyro);
Serial.print(" , y-gyro:");
Serial.print(yGyro);
Serial.print(" , z-gyro:");
Serial.println(zGyro);
}
}
|